Proponents of robotic or automated milking systems expound the many advantages such systems have, both for the lifestyle of the cow and for the lifestyle of the dairy producer.

Chief among these virtues is the desire for dairy owners to be freed from the shackles of milking cows two or three times per day and the desire not to have to employ additional workers to complete milking time chores.
From the cow’s perspective, robot milking makes a strong case for individualized performance management – optimized to each cow in the herd.
Theoretically, cows get to rest, eat and socialize when they desire and milk at 2.5 to three times per day, on average, at a time that suits their schedule. With such freedom, the expectation would be that the performance of these units should exceed those of dairy systems with traditional housing, management and rigid milking times.
While there are many fine examples of extremely well-managed units achieving impressive levels of performance, some recent industry surveys of North American robot herds suggest the average performance is somewhat disappointing – with average milk per cow per day around 70 to 75 pounds, and approximately one-third of the cows are lame. Neither of these outcomes would fit the performance expectation of this type of management system.
So what drives this lower-than-expected performance? Perhaps some of the answers lie in the decisions frequently made around the design of robotic milking facilities.
There are four significant design questions which may impact performance that producers must ask when designing a unit:
- How do we get cows to attend the robot to be milked?
- How do we remove manure from the alleys when the cows remain in the pen all day long?
- Can we benefit from the cost savings of a three-row pen compared to a two-row pen because of the difference in feeding system and cow behavior?
- Where do we put the footbath for the control of infectious hoof diseases?
1. How do we get cows to attend the robot to be milked?
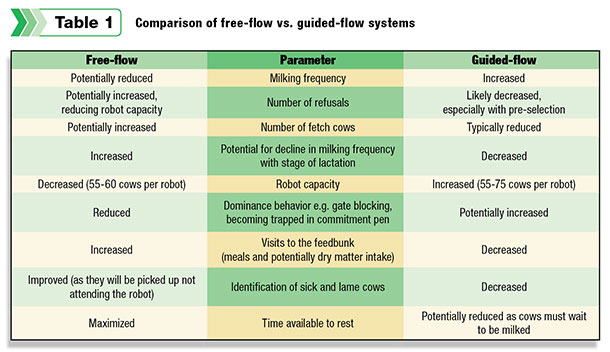
Robot attendance is key – and this is where there exists significant philosophical differences and variability in the industry. Some favor free-flow systems, where voluntary robot attendance is driven by the availability of a specialized feed pellet in combination with the availability of a mixed ration at the feedbunk.
This feeding system approach is unlikely to optimize rumen health and creates challenges for ration formulation. Others favor guided-flow designs – chiefly milk-first or feed-first options with the use of a commitment pen.
The milk-first option is likely the preferred choice among these options, where robot attendance is driven by a desire to visit the feedbunk, with the consumption of less feed in the robot.
While use of a commitment pen in this scenario reduces non-productive visits to the robot and potentially increases robot performance and the number of cows that may be supported, it adds a layer of complexity when dominant cows get to block the progress of subordinates, and it reduces the available access time to feed and a place to rest.
A comparison of the different systems is given in Table 1.
 Despite the controversy, it is likely that managers learn to optimize whatever system they choose, and the reason for the lower-than-expected overall performance lies elsewhere.
Despite the controversy, it is likely that managers learn to optimize whatever system they choose, and the reason for the lower-than-expected overall performance lies elsewhere.
2. How do we remove manure from the alleys when the cows remain in the pen all day long?
The problem of manure removal in these facilities drives two decisions which are unlikely to enhance animal productivity – use of slatted floors and mat or mattress stall surfaces.
Since the option to manually remove manure from alleys is ruled out, robot systems must either use slatted flooring or automatic scraper removal systems, with the former being most common.
Slatted floors do little to enhance lameness control; cows dislike walking on them and there is increased risk for trauma of the claw capsule. Some of this risk may be mitigated by the use of rubber flooring – but this also carries an inherent problem.
The option to use slatted floors often goes hand-in-hand with a decision to use rubber mat or mattress stall beds in combination with organic bedding (more easily managed with the slat floor system) and rules out the use of deep, loose-bedded stalls with sand bedding.
To date, the studies comparing cow behavior on rubber floors with concrete floors in the freestall pen all show a reduction in lying time and an increase in idle standing on the rubber floors. This behavioral change tends to increase the risk for sole hemorrhage and ulceration.
Indeed, lameness in conventional mattress herds tends to be around 40 percent higher on average than in similar sand-bedded facilities, which appears to hold true for robot facilities as well.
While the use of automatic scrapers may be associated with an increased risk for digital dermatitis (heel wart) infection, they are compatible with sand-bedded facilities and solid concrete flooring without rubber. Most of the milking robots are also compatible with sand – not withstanding some added equipment wear issues that need to be addressed.
3. Can we benefit from the cost savings of a three-row pen compared to a two-row pen because of the difference in feeding system and cow behavior?
Because robot attendance is spread throughout the day for each individual cow, an argument can be made that there is less pressure on bunk attendance after rigid milking times and hence less of a need to provide sufficient bunk space for all the cows to eat at the same time.
This belief drives the use of three-row pens over two-row pens for robot facilities, thereby offsetting the higher costs of such a facility.
This philosophy is so rampant that it is relatively rare to find newly designed two-row pens with robot units, negating an effective comparison between the two. However, we know that fresh feed delivery drives bunk attendance in conventional herds, and peak bunk attendance drives intake.
In short, if cows do not get to eat when all the other cows are eating, they do not return to the bunk and eat more later on; in fact, they eat less.
While many well-managed herds with three-row pens succeed by optimizing bunk management, it may well be that use of a three-row pen is a limiting factor in many robot facilities.
Some support for this viewpoint comes from the observation that producers seem to see higher productivity at around 50 cows per robot (which is the industry average) compared to the desired 60 to 70 cows per robot recommended by many of the equipment manufacturers.
Obviously, there is a confounding impact on the potential for competition around the robot entry and attendance rates with fewer cows.
4. Where do we put the footbath for the control of infectious hoof diseases?
Cows in any freestall facility live in contact with their manure in wet, contaminated alleys (even with slats), and there is a need to control digital dermatitis through regular routine footbathing. Left unchecked, this disease can significantly elevate lameness risk.
Originally, many robot designs did not include a footbath in the setup – fearing that it would reduce robot attendance, which is a regrettable mistake. Some units have retrofitted heel flush systems in the robot itself to help clean and disinfect the rear feet, while others have found a location for the footbath in the exit lane from the robots.
Other factors
Obviously, many other factors may challenge robotic herds and hinder their ability to reach target performance. Some non-facility factors undoubtedly have a part to play – such as the ability of producers to review and assimilate large amounts of individual cow data each day and their willingness to identify and fetch cows that need to be milked.
The facility design questions raised here are consistent with experiences in conventional herds, and it is likely that cows in robotic herds do not behave entirely differently.
We favor the design of pens with 50 cows per robot, housed in two-row pens with sand-bedded stalls and solid concrete floors with automatic scrapers and well-designed footbaths in the exit lane (Figure 1).
Click here to view Figure 1 at full size in a new window. (PDF, 487KB)
Whether a free-flow or milk-first guided-flow approach is used, the design of the access area is critical to avoid bullying and limited access to the milking machine.
A priority for facilities with more than one robot would be to consider the splitting of cow groups into mature and first-lactation/smaller cow groups to assist in the management of the younger cows and potentially reduce their inherent susceptibility to bullying.
Whichever design is used, there will likely be a need to identify and fetch cows in both early and late lactation to ensure optimal productivity.
As more and more facilities are constructed in the U.S., researchers will have the ability to examine differences in performance characteristics in more detail and refine the design considerations discussed herein.
In this article, we have attempted to question the design decisions being commonly made and at least entertain other options that may enhance the functionality of these systems. PD
Nigel Cook is currently chair of the Department of Medical Sciences at the University of Wisconsin – Madison School of Veterinary Medicine and manages the Dairyland Initiative.
PHOTO: An example of a footbath situated between the central crossover alleys and the robots, and fitted with one-directional gates to prevent cows from entering backwards into the robot area. Photo provided by Nigel Cook.

-
Nigel B. Cook
- Veterinarian
- UW-Madison, School of Veterinary Medicine



