
Just like snowflakes and udder conformations, no two farms are exactly the same. Robotic milking has certainly highlighted this fact as more North American dairy producers are preparing their farms for the latest in milking technology. Before the robots are delivered to the farm, many planning decisions need to be in place. How should I design the layout of my barn? Which cow traffic system should I use? What about feeding strategies, bedding management and cow comfort?
It’s important to remember that what works for your neighbor might not work for you.
However, to get the best return on your investment, it’s wise to research proven methods used by several farmers under different circumstances – and then decide what’s best for your operation.
For this article, I will focus on the different cow traffic scenarios used at robotic dairies. Most automated milking systems give cows voluntary access to the robot, which means they decide when they want to be milked.
Your goal as the dairy owner or manager is to strike the right balance between cow motivation and herd management variables, like:
• Feeding strategy
• System capacity
• Labor efficiency
• Initial investment
• Control vs. freedom
There are two main categories of cow traffic systems – free cow traffic and guided cow traffic. Let’s see how they stack up against these five variables.
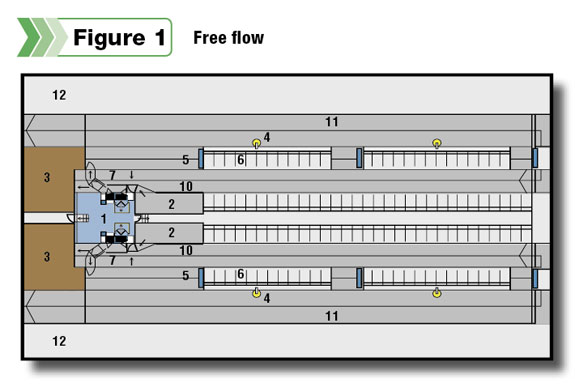
Free cow traffic
With this system, cows have unlimited access to the feedbunk, stalls and robots. This is the most popular system in the world. (See Figure 1).
Feeding strategy: Works with PMR (partial mixed ration) feeding strategies if at least 50 percent of a cow’s daily grain consumption (dry matter basis) is delivered through the robot.
If only forage is provided at the feedbunk, external feed stations are needed to deliver small portions of concentrate.
In North America, most robotic milking farms use a partially mixed ration (PMR) with the exception of some western Canadian provinces.
Capacity: Due to the level of refusals (cows visiting the robot without milking permissions), there is a potential for loss of milkings. In a grazing system, a selection gate at the exit of the barn is needed to ensure frequent and regular milking intervals. This system generally handles 55 to 60 cows per robot.
Labor efficiency: Approximately 15 percent of the herd needs to be fetched – or brought to the robot – on a daily basis.
Initial investment: This cow traffic system has the lowest initial investment compared to other scenarios.
Control vs. freedom: With this system, you cannot determine how many times cows enter the commitment pen or feed lane. Furthermore, there is no way to guide a cow to be milked more consistently. On the other hand, there are no fences inside the main barn, which allows cows to move freely.
Guided cow traffic
This cow traffic system is designed to increase robot capacity and labor efficiency. In this system, a selection gate is used to guide and pre-select cows for milking.
The gate’s software determines whether or not a cow has permission to milk based on her expected yield, hours since last milking, lactation number and stage of lactation. This ensures that when a cow visits the robot, she will be milked or diverted – eliminating refusals and increasing station capacity.
Guided cow traffic also takes advantage of every feedbunk visit by using the selection gate to ensure that milking intervals are more regular and the fetch rate is lower – improving labor efficiency. This system requires one-way gates between stalls and feed lanes.
There are two kinds of guided cow traffic:
Feed-first pre-selection
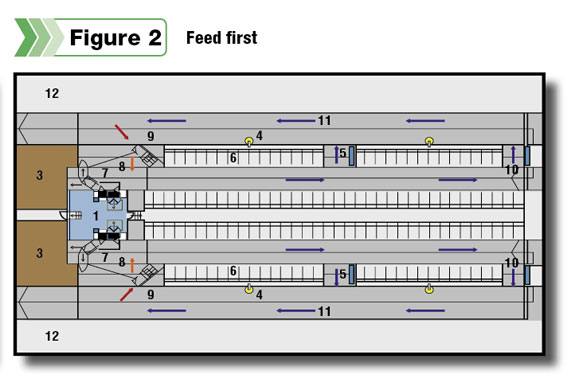
After visiting the feedbunk, cows are pre-selected on their way back to the stalls. If they have milking permissions, they will be diverted into the commitment pen to go through the robot.
Without milking permissions, they can go rest. This is a very popular system in Canada as well as northern and western Europe. (See Figure 2)
Feeding strategy: Works with PMR feeding strategies if at least 50 percent of a cow’s daily grain consumption (dry matter basis) is delivered through the robot.
This is also a great option for forage-based diets where no grain is fed at the feedbunk. Cows will get grain after the selection gate at the robot or a feed station in the feed pen, ensuring rumen health and lower fetch rates.
Capacity: By avoiding refusals, pre-selection can increase the number of daily milkings per robot by making better usage of milking permissions and, consequently, increasing stall efficiency. This system generally handles 55 to 75 cows per robot.
Labor efficiency: With pre-selection, daily fetch rates are, on average, only 1 to 5 percent of the herd – a definite advantage to this system.
Initial investment: Adding selection gates, one-way gates and fencing for the commitment pen increases the initial investment. It’s therefore important to evaluate return on investment.
Control vs. freedom: With one-way and selection gates, you can determine how often a cow enters the commitment pen, feed lane and stall area. You can also control the milking intervals.
This traffic scenario is all about creating a pattern, which requires knowledge of the system and devices to
ensure the cows flow with freedom.
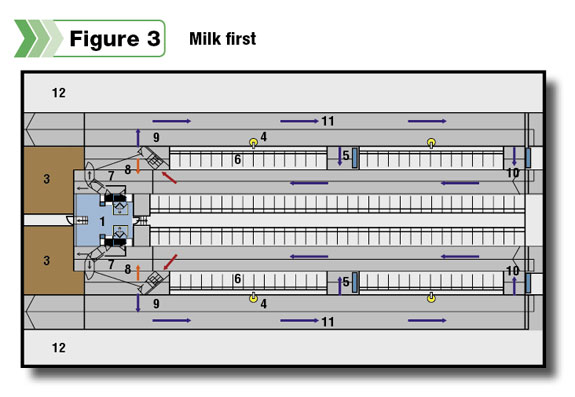
Milk-first pre-selection
Cows are pre-selected on their way from the stalls to the feedbunk. If they have milking permissions, they will enter the commitment pen to go through the robot; without milking permissions, they can go eat.
This system is very popular in the U.S., Eastern Germany and Russia, mainly due to their shared management and feeding practices for medium to large herds. (See Figure 3)
Feeding strategy: What differentiates this option from the other cow traffic scenarios is its greater flexibility regarding feeding strategies.
The milk-first pre-selection system works with PMR feeding strategies requiring a minimum of only 20 percent average grain consumption (dry matter basis) per cow per day delivered through the robot. The cow’s main motivator is the PMR she will get at the feedbunk.
Producers choose this kind of system because it is a familiar feed management strategy and also costs less if mixing grain grown on the same farm.
Most farms apply the PMR strategy with minimum amounts of grain delivered through the robot (on average 4 lbs per cow per day) and are still able to reach ideal milking frequencies. It’s also possible to feed more grain at the robot or external feeding stations if desired.
Regarding capacity, labor efficiency, initial investment and control vs. freedom, this scenario has the same characteristics as the feed-first pre-selection cow traffic system.
Making the right cow traffic choice means considering how these herd management variables match your specific needs. I regularly tell producers: Your dairy facility should suit your management philosophy and lifestyle – not the other way around. PD
Rodriguez is a veterinarian and works for DeLaval as an adviser for automated milking systems in North America.




