
A single-stall robot can milk up to 70 cows while maintaining high milking performance standards and efficiencies common to most operations. So producers can choose to start milking a percentage of their herd with robots versus a complete shift from the current system. Of course, more cows can be transitioned, or added, at a predetermined pace in increments of around 70. With that in mind, the design should be planned to be responsive to growth expectations.
Before discussing an example design, I should mention the planning process is supposed to be challenging, and success begins with that realization and a strategy for coping with the challenges. Much like the goals we set for any objective on or off the farm, we use the following simple outline for guidance:
- Establish goals and expectations.
- Identify the problems standing in the way of attaining those goals.
- List relevant variables to be considered and interdependencies of those variables.
- Start fitting the pieces together.
As an architect and project design manager, for me the key is learning the interdependencies of the variables. Some will be obvious, while others will not present themselves until after planning has started, which can be discouraging. Variables for one producer, such as wind or available land, may be a non-factor for another, and those interdependencies can change the whole design thought process. But it is critical to stay focused and not give up because the best solutions present themselves soon after doubt creeps in.
Now that we’ve established the prerequisites, let’s dive in and share some experiences from a real design project.
Design summary:
- Nine distinct buildings with six robots in each building, for a total of 54 robots (or approximately 3,700 cows)
- Three phases planned
- Guided, milk-first cow flow
- One milk collection point
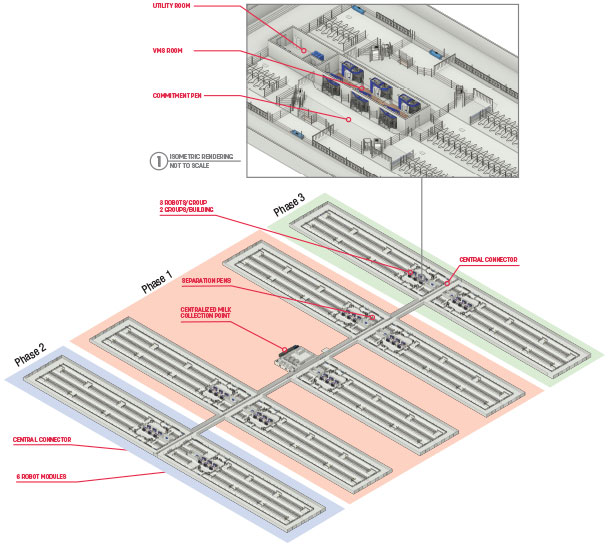
Click here or on the image above to view it at full size in a new window.
For this project, we first established how many cows were ultimately to be milked by robots. Then, together with the dairy, we determined how many cows would be added and at what intervals. In this case, there were to be three phases spread out over seven years. So 30 robots by 2020, an additional 12 robots in 2023, then the final 12 robots in 2026. It is important to realize things can, and likely will, change so all the parties involved must remain flexible and know that we may adjust milestone dates and robots to be added along the way.
After setting goals and expectations, the planning process begins. At this point, the team had a strong urge to figure out the size of the robot modules and where in the building they were to be located. But there was a driver, or interdependency, that was most certainly going to dictate final layout, which was the pre-selected site.
The chosen site had excellent prevailing westerly winds and little in the way of limitations with respect to topography, natural or manmade obstructions, easements, setbacks or other factors dictating size of the final design. We chose more buildings over one or two large buildings so we could take advantage of the winds for natural ventilation. That approach also supports the three-phase growth plan and flexibility to alter that plan going forward. That flexibility will come at a price: More buildings require a greater amount of land. In this case, that value was of strategic importance to the producer.
After determining the building style based on growth plans and site considerations, we began planning the robot modules. We knew we would use three robots for each group of about 210 cows. Another given is: The dairy would implement a milk sampler that allows six robots per sampler system. But here’s where a level of flexibility comes in, already in the beginning design phases.
Initially, it was determined there would be 12 robots in each module so we could centralize mechanical, electrical and plumbing runs. However, when we started running simulations of work routines such as moving cows and people walking from building to building, chemical and teat dip delivery, and dump milk collection, we saw the need to add a central transfer lane as a connector, protected from the outdoor elements. After drawing the concept and running some rough construction cost-versus-labor-savings numbers, we found it was feasible to add the connector. That meant we needed to divide the robot clusters into modules of six rather than 12.
Now we established the best path forward was to plan for nine buildings, each with six robots. The next step was to arrange the buildings. We knew the milk collection point would be centralized, sized in a location that could support all 54 robots within current milk transport and cleaning solutions. We also knew the buildings would be as close together as possible while still allowing prevailing winds to ventilate. Those givens, plus the connector, led to the master plan illustrated in the renderings (see rendering).
A flush system was determined the best option for manure handling in this setup. The water delivery follows the connector, and the valves releasing water into the alleys are centralized at the robots. In flush barns, it is ideal to flush away from the robot area so the dirtiest water is far from the milking area.
The plan was to first construct the milk house and five buildings, for a total of 30 robots. Then when phase two comes to fruition, two buildings with six robots would be added to one side, and phase three would add the final two buildings
of six robots to the other side.
With these major decisions made, we pulled together the other details that will fit inside that “box.” However, the next challenge was to determine a plan for the existing milking system the robots are replacing. For this project, separation pens were designed adjacent to the robots so pre-fresh heifers can be easily trained to learn the robot, and so fresh heifers and cows, treated cows and special-needs cows can be milked. Others have opted to keep their conventional parlor in use to milk the managed cows mentioned above, thereby freeing up the robots to just milk their wet herd. This is, of course, a choice that is a big part of the planning process and will also be a driver for the final layout of the robot facility.
Planning dairies has always been challenging as well as rewarding, and adding robots to the mix makes it even more interesting. The scalability factor introduced by single-stall robots that now comes into play must be seriously weighed against the future growth prospects of each dairy. With this complete approach, and working with a planning and design professional, dairy producers can be assured they will have an effective, flexible layout that works with the unique goals of their herd. ![]()

-
Jeff Prashaw
- Project Design Manager – Architect
- MANA
- DeLaval Inc.
- Email Jeff Prashaw



